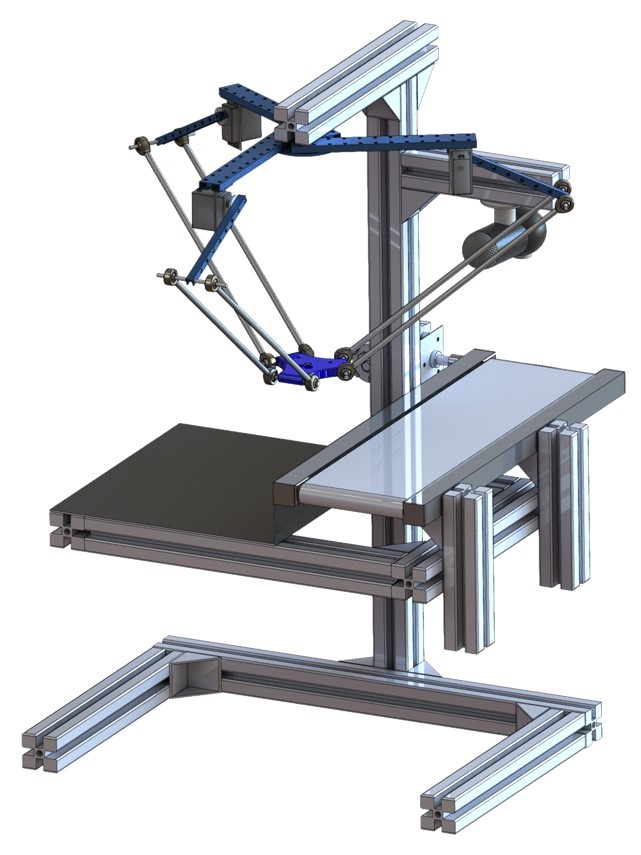
The delta robot was a semester long project in my second year. In the first half the delta robot had to be designed, build and programmed using a PLC and HMI. The pill location would be entered manually on the HMI. The second half of the project the control needed to be automated by a vision system. And for extra difficulty the pills would be moving on a conveyor belt. The budget for the project was extremely low so that’s why it is not the fastest delta robot by far. But the knowledge gained from the project is very valuable.
Pills where picked by a vacuum gripper and the delta robot moved by using hobby servos. The vision system comprised of a normal webcam and a program written in Python and using OpenCV to process the images and control the PLC. The robot also had an automated calibration function, which used a cross-laser to calibrate the x and y axis of the robot. And to calibrate the height a vacuum sensor was used in combination with the vacuum gripper.